Reconfigurable systems offer flexible platforms in which to optimize a memory subsystem for a single application or a class of applications. While architectural research on FPGA has been partial to processor designs, the same flexibility and performance offered by today’s FPGAs are equally suitable for the memory subsystem design. As the performance disparity between processor and memory intensifies [1], high performance or real-time application performance continues to be limited by the memory subsystem [2]. Consequently, studies on efficient memory subsystems should be considered alongside the processor design as memory performance must be scrutinized on new architectures. While FPGA platforms continue to provide a larger number of configurable logic blocks that can be mapped to processing elements to satisfy computing demands, the interconnect delays and relatively slower memories maintain an imbalance between processor and memory performance. Traditional approaches to compensate for poor memory performance such as caches are not effective due to poor temporal locality of data for streaming data [3], and especially when large memory buffers are not available on FPGA platforms. Data duplication on distributed memory buffers is also not effective as the chip area can be better utilized for processing. This paper presents a flexible memory subsystem for stream computation. The memory subsystem builds upon configurable stream units that move data while computation is performed. The stream units are specialized DMA units that are optimized for stream data transfer. They rely on a set of stream descriptors, which defines the memory access pattern, to prefetch and align data in the order required by thecomputing platform. In using the stream units in the memory subsystems, the architecture effectively decouples the communication from computation, and allows hardware designers to address their implementation and optimization ndividually. The stream units take advantage of available bandwidth by prefetching data before it is needed, and consequently, the system performance becomes dependent on average bandwidth of the memory subsystem with less sensitivity to peak latency to access a data element.
RELATED WORK
The streaming programming model separates communication from computation, allowing either programmer or compiler to specify each portion independently [4]. Properties of streaming model of computation include:
• Computations kernels are independent and self contained Computation kernels are localized such that there are no data dependencies between other kernels. A programmer can annotate portions of a program that exhibit this behavior for mapping onto a stream processor or accelerator.
• Computations kernels are independent and self contained Computation kernels are localized such that there are no data dependencies between other kernels. A programmer can annotate portions of a program that exhibit this behavior for mapping onto a stream processor or accelerator.
• Computation groups are relatively static The processing performed in each computation group is regular or repetitive, which often come in the form of a loop structure. There are opportunities for compiler optimization to organize the computation as well as the regular access patterns to memory.
• Explicit definition of communication Computation kernels produce an output stream from one or more input streams. The stream and other scalar values which hold persistent application state are identified explicitly as variables in a communication stream or signal between kernels.
• Data movement exposed to programmer A programmer can explicitly define movement of data from memory or to other computation kernels. Hardware mechanisms such as a DMA or stream unit provide this capability without interrupting the processor. The stream processing model seeks to either minimize data movement by localizing the computation, or to overlap computation with data movement. Furthermore, the programmer can retune the application memory access as memory bottlenecks arise.

There is a number of streaming processor architectures developed over recent years. Examples of stream processors include RAW [5], Imagine [6], Merrimac [7], and the RSVP™ architecture [8,9]. There is also another class of streaming architectures with origins from reconfigurable platforms such as FPGA. These architectures rely on the flexibility of the platform to synthesize streaming accelerators based on programmer definition. In comparison to the above mentioned architectures, a set of compiler tools create optimized hardware configurations rather than map computation onto existing design. They are associated with the programming language or compiler tool that allows software developers to configure hardware for stream computation. Examples include SCORE [10], ASC [11], and Streams-C [12]. While each approach is different, stream architectures provide hardware mechanisms that can configure their datapaths for different types of parallelism in stream computation. Furthermore, they include programmable communication infrastructure to move data based on programmer defined API. In this paper, we propose the use of stream descriptors [8,9] for use in a reconfigurable FPGA platform to generate an optimized memory subsystem. Stream descriptors are a language extension to specify memory access patterns, which is used by dedicated stream units to prefetch and assemble data. The programmer describes the computation independently from stream descriptors, and then a compiler synthesizes the proper hardware for stream processing. The FPGA platform allows exploration of different configurations of the memory hierarchy. Once optimized for a particular class of applications, the design can be ported into standard or structured ASICs design flows for fabrication.
STREAM MEMORY HIERARCHY
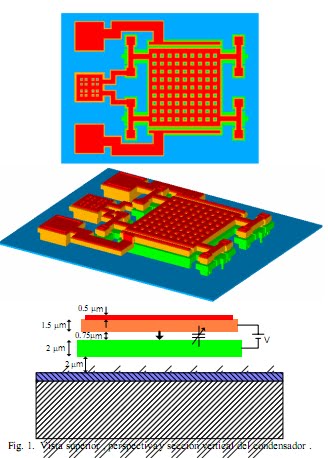
A design framework is being developed to automatically generate synthesizable streaming accelerators [13]. Using stream programming languages [9,14,15,16] which includes programmer’s explicit definition of streams and their movement, an integrated memory subsystem can be built. This approach selects designs from well-engineered framework consisting of accelerators and network rather than generating hardware from a generic representation of a high level language [17]. The memory subsystem builds upon stream units that moves data based on stream descriptors, as shown in Figure 1. Single or multiple accelerators in various configurations can be built. Furthermore, systems with multiple scalar processors, bus, peripherals or memory controllers can be configured such that the stream unit and accelerator are placed appropriately according to the flow of data. Stream descriptors have been recently applied to stream processors [8,9] and peripherals [18,19] to leverage on the deterministic movements of data from memory. In this paper, the stream descriptors are applied to the entire memory subsystem so as to enable stream data movement throughout the computing platform. The goal of this research is to generate an optimized memory subsystem based on stream programming input. As data stream type and movement are explicitly defined, there are opportunities to optimize the memory subsystem by prefetching and overlapping movement with computation. By distributing stream units throughout the memory subsystem, the design framework avoid large cache mechanisms that are not efficient for streaming computation and are difficult to synthesize on FPGAs. This following section describes the stream descriptors used to capture stream access patterns in memory. Furthermore, an example stream unit design is described with preliminary results from synthesis.
Stream Descriptors
are mechanisms to allow theprogrammer to describe the shape and location of data inmemory. Dedicated stream units can then utilize the streamdescriptors to prefetch data from memory for the computingplatform. Each stream unit handles all issues inloading/storing of data: address calculation, byte alignmentdata ordering, and memory bus interface. A compiler can alsschedule the loading of a stream descriptor that is dependenon run time values. A stream descriptor is represented by the tuple (TypeStart_Address, Stride, Span Skip, Size) where:
 • Type indicates how many bytes are in each element (Type is 0 for bytes, 1 for 16-bit half-words, etc.)
• Type indicates how many bytes are in each element (Type is 0 for bytes, 1 for 16-bit half-words, etc.)• Start_Address represents the memory address of the first stream element.
• Stride is the spacing, in number of elements, between two consecutive stream elements.
• Span is the number of elements that are gathered before applying the skip offset
• Skip is the offset is applied between groups of span elements, after the stride has been applied
• Size is the number of elements in the stream The Stride, Span, Skip, and Type fields define the shape of a data object.
The grouping and order in which data is accessed defines a Stream Record and corresponds to the preferred alignment of the computation kernel. Stream records can be processed in parallel by hardware accelerators and this explicit alignment of the data facilitates their hardware implementation by eliminating packing and unpacking instructions. Multidimensional or even non-regular spaces can be created by extending the defined semantics of each stream descriptor field. More details are available in [8,9].
Stream Unit
The stream unit consists of one or more input and output stream modules, which are generated to match the needs of the streaming accelerators. In Figure 2, there are two input and one output stream modules. The stream unit is used to transfer data from a system memory or peripheral, and present them in-order to the streaming accelerator. It also transfers processed data back to other memory locations. The following paragraph describes internal operations of the input stream module. The address generation unit (AGU) generates bus addresses based on stream descriptor values and stores pending requests in a queue (Addr Queue). The AGU has similar functionality to [20] but with more robust stream descriptors that allows for different bit-widths and more complex access patterns. The Addr Merge unit thenselects the next bus address to issue, while removing duplicate bus addresses. Data is then stored in the line buffer when the PLB bus returns data from memory. A Tag unit selects stream elements from the line buffer for storage into a stream buffer queue. Data is then presented to the streaming accelerator as aligned data, in the order defined by the stream descriptor. The output stream module consists of similar internal components, but data flows in the opposite direction. Processed data is first stored in stream buffers, which are selected for transfer by the Tag unit. A line buffer holds the set of selected stream data which can be stored at a specified bus address, stored in the Addr unit. The stream unit can be configured to match application requirements based on stream descriptor values, and characteristics of the bus-based system and streaming accelerators. For example, the number of storage elements (stream buffers) and their sizes (bit-width) are selected based on the stream descriptor values and requested bandwidth of the streaming accelerator (stream bandwidth) so that the stream module can provide the maximum number of stream elements requested per cycle. Furthermore, the Address Queue buffer size is selected based on the maximum number of pending requests supported by the bus. The bus line buffer size is set based on bus bandwidth and bursting schemes. This would allow maximum saturation of the bus that can pipeline transfer requests from the memory controller or peripherals. Finally, the address generation unit can be hardwired to generate the memory access patterns based on stream descriptors. Table 1 shows the preliminary synthesis results for different configurations of the stream unit. The resulting clock speeds is about 130MHz on the selected Xilinx FPGA device. A single configuration parameter (in columns) is varied while other parameters are held constant. In general, the larger the buffer sizes, the larger the stream unit. For larger bit-width parameter, the stream unit gate count can actually decrease due to reduced logic to handle multiple bytes within a 32bit word. The current logic circuits can be further optimized by restructuring the logic in Tag unit which compares against the bus address in Addr Queue unit when accessing the line buffer.
Jorge Polentino
19769972
CRF